Kritische overwegingen met betrekking tot verbonden autonome voertuigen, zoals ethiek, aansprakelijkheid, privacy en cyberbeveiliging, delen niet dezelfde focus als de voordelen van CAV’s. Hoewel de meeste aandacht wordt besteed aan het vermogen van CAV’s om dodelijke ongevallen te verminderen en minder brandstof te gebruiken, zijn de uitdagingen van het voertuig net zo discutabel.
In drie IEEE Standards Association-webinars – nu op aanvraag beschikbaar – bespreken experts kwesties die verband houden met autonome mobiliteit, onderwerpen die niet vaak aan bod komen in de reguliere media.
Etnische twijfels
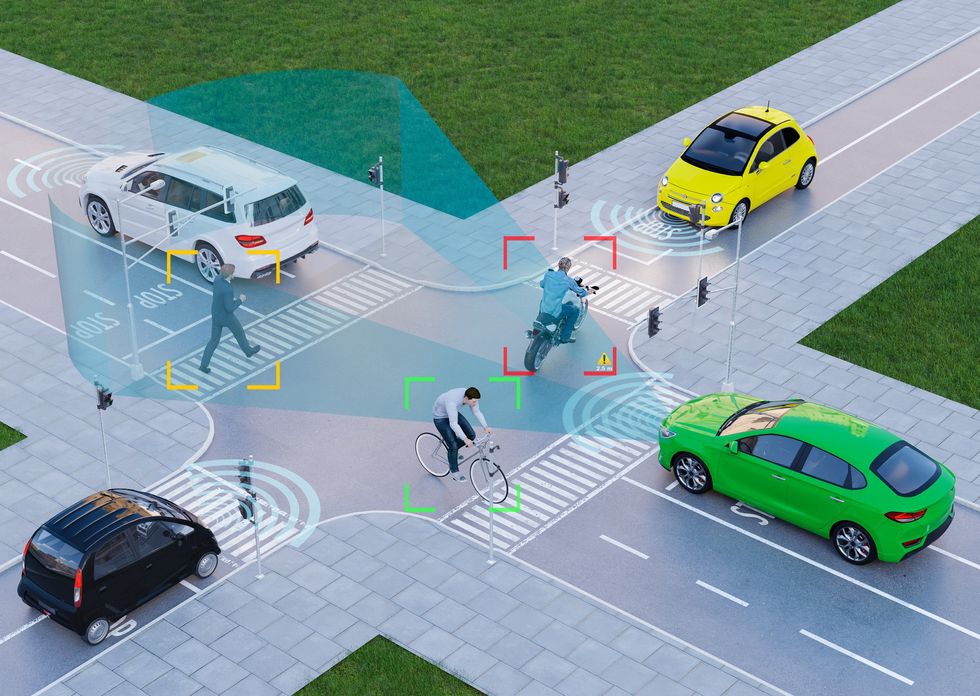
Als het om ethiek gaat, lijkt de nadruk vooral te liggen op de manier waarop AI de CAV helpt mensen, objecten en verkeerssituaties te herkennen.
Achter het stuur: wie bestuurt een auto zonder bestuurder? Tijdens het webinar wees IEEE Fellow Raja Chatila, emeritus hoogleraar aan de Sorbonne Universiteit in Frankrijk en lid van de Nationale Pilotcommissie voor Digitale Ethiek van het land, op een vroeg voorbeeld. Het ging om het trainen van een AI-systeem om afbeeldingen van gelijkaardige mensen te herkennen. Maar daar was de donkere ruimte niet bij betrokken, en als gevolg daarvan kon het systeem geen gekleurde mensen identificeren, een situatie die rampzalig zou kunnen zijn bij toepassingen voor autonoom rijden.
Waarschijnlijk de meest controversiële ethische kwestie is de overtuiging dat CAV’s levensreddende beslissingen moeten kunnen nemen die vergelijkbaar zijn met de beslissingen die worden gepresenteerd in een populair experiment dat zich richt op ethiek en psychologie: het zogenaamde rolstoelprobleem. In het scenario wordt de karrenchauffeur geconfronteerd met een dreigende botsing op de baan en heeft hij slechts twee opties: niets doen en vijf mensen op de baan aanrijden, of aan een hendel trekken om de baan te verschuiven en de kar met één man op ramkoers te plaatsen. persoon.
In werkelijkheid zou de CAV geen ethische of morele beslissingen moeten nemen. In plaats daarvan moet zij beoordelen wie en wat een groter risico loopt en haar activiteiten aanpassen om schade, letsel en overlijden te elimineren of tot een minimum te beperken. Ethisch gezien moeten CAV’s, die machine learning of kunstmatige intelligentie gebruiken, nauwkeurige risicobeoordelingen maken op basis van objectieve kenmerken, en niet op kenmerken zoals geslacht, leeftijd, ras en andere menselijke identificatiegegevens, zei Chatila.
Toewijzing van verantwoordelijkheid
Als een CAV betrokken is of een ernstig ongeval veroorzaakt, wie is dan verantwoordelijk? Voertuig, menselijke bestuurder of fabrikant? Het is duidelijk dat als een voertuig een fabricagefout heeft die niet door een terugroepactie wordt opgelost, de fabrikant een grotere verantwoordelijkheid moet nemen.
De vraag blijft: wie of wat is verantwoordelijk bij een ongeval? De fabrikant kan aanvoeren dat, omdat handmatige voertuigbediening beschikbaar is, de bestuurder verantwoordelijk is. De bestuurder zou echter kunnen beweren dat een fout in het geautomatiseerde systeem van de fabrikant de oorzaak is. Met de vinger wijzen is niet de oplossing.
Webinar Mens vs. Digital Driver behandelt deze en soortgelijke homologatieproblemen. Homologatie omvat het proces waarbij wordt bevestigd dat voertuigen rijklaar zijn en voldoen aan de criteria die zijn opgesteld door overheidsinstanties die verantwoordelijk zijn voor de verkeersveiligheid.
Het webinar bespreekt de zes niveaus van vooruitgang op het gebied van rijhulptechnologie die zelfrijdende auto’s kunnen doorlopen:
- Niveau 0: Onmiddellijke rijhulp (volledige bestuurderscontrole; geen automatisering; bestuurder is verplicht).
- Niveau 1: Bestuurdersassistentie (kleine automatisering zoals cruise control; tussenkomst van de bestuurder vereist).
- Niveau 2: Extra assistentie (gedeeltelijke automatisering; geavanceerde rijhulpsystemen zoals stuur- en acceleratiecontrole; tussenkomst van de bestuurder vereist).
- Niveau 3: Voorwaardelijke automatisering (omgevingsdetectie; voertuig kan de meeste bestuurderstaken uitvoeren; tussenkomst van de bestuurder vereist).
- Niveau 4: Hoge automatisering (uitgebreide automatisering; tussenkomst van de bestuurder is optioneel).
- Niveau 5: Volledige automatisering (volledige rijcapaciteiten; vereist geen tussenkomst of aanwezigheid van de bestuurder).
De CAV-industrie heeft niveau 4 en 5 nog niet bereikt.
Privacyoverwegingen en veranderingen in de verkeerswetgeving
Privacy- en cyberbeveiligingsproblemen zijn alomtegenwoordig geworden in elke toepassing met CAV’s, wat hun eigen zorgen met zich meebrengt, zoals vermeld in het webinar Risk-Based Methodology for Performing AI System Test Scenarios.
Een voertuig hoeft niet autonoom te zijn om inbreuken op de privacy te ervaren. Het enige dat nodig is, is een GPS-volgsysteem en/of één of meerdere passagiers met een smartphone. Omdat beide technologieën afhankelijk zijn van software, is de potentiële bescherming tegen cyberaanvallen in CAV’s op zijn best twijfelachtig.
Voertuigen maken gebruik van veel softwareprogramma’s, die regelmatige updates vereisen die hun bestaande functionaliteit uitbreiden en tegelijkertijd functies toevoegen. Updates gebeuren hoogstwaarschijnlijk draadloos via het 5G-netwerk.
Alles wat gebruik maakt van draadloze connectiviteit is een eerlijk spel voor hackers en cybercriminelen. In het ergste geval zou een hacker de controle over de CAV kunnen overnemen terwijl de passagiers erin zitten.
Kritische overwegingen met betrekking tot verbonden autonome voertuigen, zoals ethiek, aansprakelijkheid, privacy en cyberveiligheid, staan niet in dezelfde schijnwerpers als de voordelen van CAV’s.
Tot nu toe zijn dergelijke situaties niet wijdverbreid, maar er is meer werk en due diligence nodig om hackers voor te blijven.
Ondertussen verzamelen CAV’s grote hoeveelheden gegevens. Zij verzamelen beelden van voetgangers zonder toestemming van de voetganger of voertuigeigenaar. Momenteel zijn er geen regels over hoeveel gegevens kunnen worden verzameld, wie toegang heeft tot de gegevens of hoe deze worden gedistribueerd en opgeslagen. In essentie zijn de gegevens bruikbaar voor een veelheid aan doeleinden die de privacy van een persoon kunnen bedreigen. Gekoppeld aan de mogelijkheid van draadloze beeldoverdracht dringt dit aspect ook door in het domein van de ethiek.
Naleving van verschillende verkeerswetten is een ander punt van zorg. Automobilisten weten dat snelheidslimieten veranderen, rijstroken samenkomen of breder worden, omwegen gebruikelijk zijn en dat er andere verkeersveranderingen plaatsvinden. Ze leren zich aan te passen door verkeersborden te observeren of signalen op te volgen van politieagenten die het verkeer regelen. Maar kunnen CAV’s dergelijke veranderingen opmerken?
Uitgerust met camera’s, geavanceerde rijhulpsystemen, software en sensortechnologieën moeten de voertuigen gemakkelijk de basis kunnen aanpakken. Camera’s en beeldsensoren kunnen grafische gegevens verzenden naar software die het voertuig instrueert de snelheid aan te passen, van rijstrook te wisselen, te stoppen of andere basisrijfuncties uit te voeren.
Maar de verkeerswetten veranderen van land tot land, van staat tot staat en soms van gemeente tot gemeente. Hoewel bepaalde rijwetten universeel zijn, zoals het naleven van snelheidslimieten en verkeerslichten, verschillen andere, bijvoorbeeld wanneer van rijstrook moet worden gewisseld, of voorrang moet worden gegeven aan voetgangers, of wanneer het toegestaan is om bij rood licht rechtsaf te slaan. Weet de CAV aan welke kant van de weg hij moet rijden, afhankelijk van het land waarin hij zich bevindt? CAV zal moeten herkennen en begrijpen wanneer de regels veranderen.
CAV’s hebben een grote toekomst, maar kwesties op het gebied van veiligheid, ethiek, cyberbeveiliging, transparantie en compliance moeten worden aangepakt.
Het aannemen van een standaard zoals IEEE 2846-2022, “IEEE Standard for Assumptions in Safety-Related Models for Automated Driving Systems”, zou een manier zijn om een aantal van de uitdagingen aan te pakken.
Dit artikel is een bewerkt fragment uit de blog “Solving Critical Challenges in Connected Autonomous Vehicles”, gepubliceerd in oktober.
Uit artikelen op uw website
Gerelateerde artikelen op internet