Als we aan robotmanipulatie denken, denken we vaak aan grijpers: robots die manipulatoren (zoals vingers of andere eindeffectoren) gebruiken om met objecten te communiceren. Voor de meeste mensen kan de interactie met voorwerpen echter veel ingewikkelder zijn, en we gebruiken alle lichaamsdelen die geschikt zijn om ons te helpen met het hanteren van voorwerpen die groot, zwaar of onhandig zijn.
Deze enigszins beperkte definitie van robotmanipulatie is niet echt de schuld van de robotica. Het woord ‘manipulatie’ zelf komt van het Latijn en betekent ‘dingen grijpen’, dus er schuilt een millennium of twee aan praktische traagheid achter de term. Het in Los Altos, Californië gevestigde Toyota Research Institute (TRI) neemt een bredere kijk met zijn nieuwe mensachtige, Punyo, die zijn zachte lichaam gebruikt om objecten te manipuleren die anders onmogelijk te bedienen zouden zijn met alleen grijpers.
“Antropomorfe belichaming stelt ons in staat de complexiteit van sociale interacties te onderzoeken, zoals fysieke hulp, non-verbale communicatie, intentie, voorspelbaarheid en vertrouwen, om er maar een paar te noemen.” —Alex Alspach, Toyota Research Instituut (TRI)
Punyo begon als een grapple in TRI, maar het idee was altijd om op te schalen naar een grote, squishy mensachtige, vandaar deze concept art van een platgedrukte T-HR3:
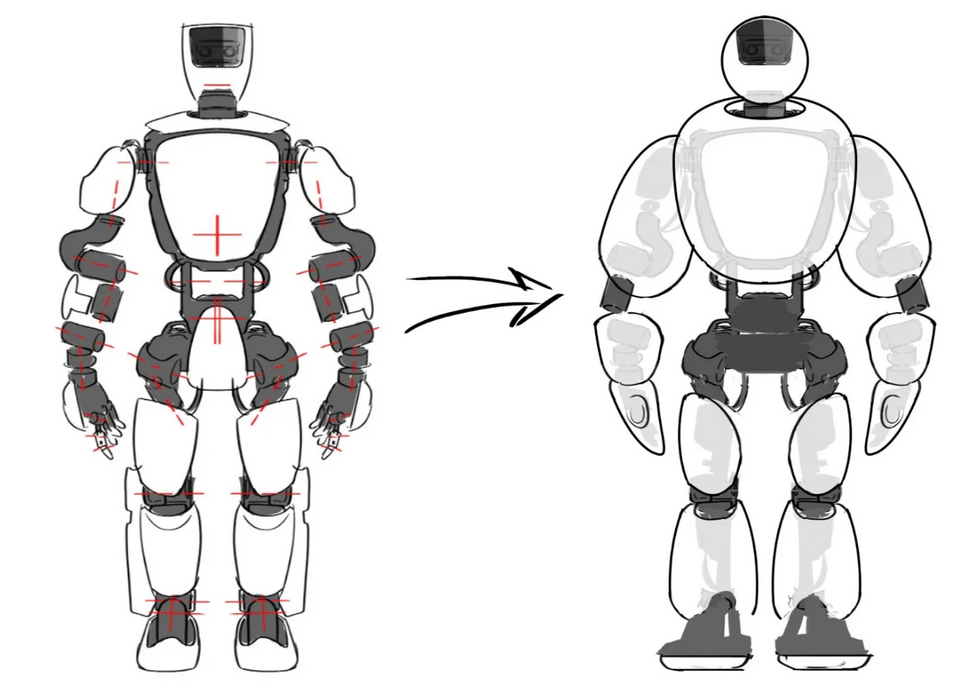 Deze conceptafbeelding laat zien hoe Toyota’s T-HR3-humanoïde eruit zou kunnen zien in de vorm van een bel.DRIE
Deze conceptafbeelding laat zien hoe Toyota’s T-HR3-humanoïde eruit zou kunnen zien in de vorm van een bel.DRIE
“We gebruiken de term ‘bubble-ized'”, zegt Alex Alspach, technisch hoofd van Punyo bij TRI. Alspach vertelt ons dat de bovenstaande conceptkunst niet noodzakelijkerwijs weerspiegelt hoe de mensachtige Punyo er uiteindelijk uit zal zien, maar het “gaf ons enkele fysieke beperkingen en een ontwerptaal. Het versterkte ook het idee dat we op zoek zijn naar algemene hardware- en softwareoplossingen die toekomstige en bestaande robots kunnen aanvullen en in staat stellen hun hele lichaam volledig te gebruiken voor manipulatie.”
Deze versie van Punyo houdt niet echt van “hele” lichaamsmanipulatie, maar hij kan veel doen met zijn armen en borst, die bedekt zijn met luchtbellen die zowel gevoel als uitlijning bieden:
Veel van deze bewegingen lijken heel menselijk, omdat mensen op deze manier dingen manipuleren. Om niet te veel schaduw te werpen op al die mensachtige magazijnrobots, maar zoals aangegeven in de video hierboven, is het gebruik van alleen onze armen voor ons om dingen op te tillen niet de manier waarop mensen dat doen, omdat we andere delen van ons lichaam gebruiken om extra ondersteuning bieden, maakt het tillen gemakkelijker. Dit is echter geen triviaal probleem voor robots, omdat interacties tussen rigide contactpunten (zoals de manier waarop de meeste robotmanipulatoren door de wereld navigeren) redelijk goed worden begrepen. Als je eenmaal grote kleverige oppervlakken in de mix gooit, samen met grote kleverige voorwerpen, is het gewoon niet iets waar de meeste robots niet klaar voor zijn.
“De zachte robot werkt Nee Communiceer op één punt met de wereld.” –Russische Tedrake, DRIE
“De huidige robotmanipulatie is geëvolueerd van grote, krachtige industriële robots die auto-onderdelen en groot gereedschap verplaatsen met hun eigen eindeffectoren”, zegt Alspach. “Ik denk dat het verstandig is om inspiratie te halen uit de menselijke vorm – we zijn sterk genoeg om de meeste dagelijkse taken met onze handen uit te voeren, maar als het om een groot, zwaar voorwerp gaat, moeten we creatief zijn in de manier waarop we onze armen eromheen slaan het en positioneer onze lichamen om het op te tillen.”
Robots staan erom bekend grote en zware voorwerpen op te tillen, voornamelijk door ze op robotachtige wijze te manipuleren met behulp van robotachtige vormfactoren. Dus wat is er zo geweldig aan de menselijke vormfactor? Deze vraag gaat natuurlijk verder dan Punyo, maar we wilden de mening van het Punyo-team over mensachtigen leren kennen, dus hebben we voor de lol nog een paar vragen toegevoegd.
IEEE-spectrum: Dus waarom mensachtigen?
alspach: De mensachtige robot voldoet aan een aantal belangrijke eisen. Allereerst zijn de omgevingen waarin we willen werken gebouwd voor mensen, dus een mensachtige vorm helpt de robot de ruimte en de gereedschappen eromheen te gebruiken. Onafhankelijk van elkaar hebben meerdere teams bij TRI samengewerkt aan systemen met twee handen voor taken zoals boodschappen doen en voedselbereiding. De borst tussen deze handen is een eenvoudig accessoire dat ons nuttige contactoppervlakken biedt voor het manipuleren van grote voorwerpen. Bovendien heeft ons Human Robot Interaction (HRI)-team uitgebreid onderzoek gedaan en blijft dit doen onder ouderen, de mensen die we graag willen helpen. Antropomorfe belichaming stelt ons in staat de complexiteit van sociale interacties te onderzoeken, zoals fysieke hulp, non-verbale communicatie, intentie, voorspelbaarheid en vertrouwen, om er maar een paar te noemen.
“We concentreren ons niet op zeer precieze taken, maar op grove manipulatie van het hele lichaam, waarbij robuuste strategieën helpen bij het stabiliseren en controleren van objecten, en een beetje slordigheid een voordeel kan zijn.” —Alex Alspach, DRIE
Maakt het hebben van een bubbelrobot het moeilijker voor je?
Russ Tedrake, vice-president van robotica-onderzoek: Als u denkt dat uw robot op een gegeven moment met de wereld communiceert – de standaardweergave van b.v. impedantiecontroles – dan plaats je een zachte, passieve veer in serie tussen je robot en de wereld werken beperk de prestaties. Het vermindert uw controlebandbreedte. Maar deze opvatting gaat voorbij aan een belangrijker punt. De zachte robot werkt Nee Communiceer op één punt met de wereld. Zachte materialen veranderen de contactdynamiek fundamenteel door rond het materiaal te vervormen, waardoor verbindingen ontstaan die contactkrachten en momenten mogelijk maken die niet kunnen worden bereikt door middel van rigide interactie.
alspach: De zachtheid van Punyo is extreem in vergelijking met andere manipulatieplatforms die bijvoorbeeld alleen rubberen kussentjes op de handen of vingers hebben. Deze uitlijning betekent dat wanneer we een object pakken, het mogelijk niet precies daar terechtkomt waar we het bedoeld hadden, of dat het, bijvoorbeeld, als we het object tegen de rand van een tafel stoten, binnen ons bereik kan bewegen. Om deze redenen is tactiele sensatie een belangrijk onderdeel van onze oplossing als we onderzoeken hoe we de toestand van de objecten die we manipuleren kunnen meten en controleren. We concentreren ons niet op zeer precieze taken, maar eerder op grove manipulatie van het hele lichaam, waarbij robuuste strategieën helpen bij het stabiliseren en controleren van objecten, en een beetje slordigheid een voordeel kan zijn.
Naleving kan op verschillende manieren worden bereikt, inclusief alleen via software. Wat is het belang van een robot die fysiek dun is en niet alleen maar een robot die kleverig is?
Andrew Beaulieu, technisch leider van Punyo: Wij geloven niet dat passieve en actieve naleving als wederzijds exclusief moeten worden beschouwd, en er zijn verschillende voordelen aan het hebben van een fysiek in de war gebrachte robot, vooral als we bedenken dat de robot in de buurt van mensen en in hun ruimtes werkt. Het hebben van een robot die veilig contact kan maken met de wereld opent mogelijkheden voor interactie en verkenning. Door geschikte materialen op de robot te gebruiken, kan deze zich ook passief aanpassen aan complexe vormen op een manier die anders complexere gelede of bediende mechanismen met zich mee zou brengen. Naleving van objecten stelt ons in staat het contactoppervlak met het object te vergroten en de krachten te verdelen, waardoor meestal een robuustere grip ontstaat. Deze conforme oppervlakken stellen ons in staat planning- en controlemethoden te onderzoeken die mogelijk minder nauwkeurig zijn, minder afhankelijk zijn van nauwkeurige objectlokalisatie of hardware gebruiken met minder nauwkeurige controle of detectie.
Hoe is het om met Punjo geknuffeld te worden?
Kate Tsui, technisch leider van Punyo HRI: Hoewel Punyo geen sociale robot is, komt er verrassend veel emotie uit zijn knuffel en het lijkt behoorlijk geruststellend. Een punyo-knuffel is als een langdurige, prettige knuffel van een goede vriend die je al lang niet meer hebt gezien en die je niet meer los wilt laten.
 Een reeks conceptuele afbeeldingen toont situaties waarin manipulatie van het hele lichaam nuttig zou kunnen zijn in huis.DRIE
Een reeks conceptuele afbeeldingen toont situaties waarin manipulatie van het hele lichaam nuttig zou kunnen zijn in huis.DRIE
(Het transcript van het interview eindigt.)
Het lijkt erop dat zachtheid een noodzakelijke voorwaarde kan zijn voor tweevoetige mensachtigen die in de nabijheid van mensen werken, vooral in commerciële of thuisomgevingen waar interacties minder gestructureerd en voorspelbaar zijn. “Ik denk dat er binnenkort meer robots zullen komen die het hele lichaam gebruiken voor manipulatie, vooral met de recente explosie van mensachtigen buiten academische laboratoria”, zegt Alspach. “Mogelijke robotmanipulatie voor algemene doeleinden is een competitief veld, en het gebruik van het hele lichaam ontsluit de mogelijkheid om grote, zware en logge objecten efficiënt te manipuleren.”
Uit artikelen op uw website
Gerelateerde artikelen op internet