We denken vaak aan robots die van de grond springen. Dat wil zeggen, ze beginnen op de grond en nemen dan, door te springen, een luchtfase op in hun voortbeweging. Maar er is geen reden waarom luchtrobots de sprong vanuit een andere richting niet kunnen benaderen, door een springgrondfase aan de vlucht toe te voegen. De Hopcopter is de eerste robot die ik ooit heb gezien die dit probeert, en hij is buitengewoon effectief, hij combineert een kleine quadrotor met een veerpoot om overal heen te kunnen springen.
Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
Dus waarom is het in de lucht de moeite waard om een pogostick toe te voegen aan een verder perfect functionele quadrotor? Vliegen is zeker een waardevol vermogen, maar het vergt veel energie. Als je goed op vogels let (erkende experts in de ruimtevaart), besteden ze doorgaans een aanzienlijke hoeveelheid tijd aan het presteren op hun best niveau Nee om te vliegen, vaak over de grond lopen of op bomen springen. Het grootste deel van de tijd niet vliegen is waarschijnlijk een van de dingen die vogels zo succesvol maken. Het is dit multimodale vermogen om te bewegen dat hen heeft geholpen zich aan zoveel verschillende omgevingen en situaties aan te passen.
De Hopcopter is ook multimodaal, zij het in een iets restrictievere zin: de twee modi zijn hover en hover. Maar intermitterend vliegen is erg belangrijk, omdat het verkorten van die vluchtfase de Hopcopter enkele van dezelfde efficiëntievoordelen geeft als vogels. Op zichzelf kan een quadrotor ter grootte van een hopcopter ongeveer 400 seconden in de lucht blijven, terwijl een hopcopter meer dan 20 minuten onafgebroken kan springen. Als het uw doel is om een zo groot mogelijke afstand af te leggen, is de Hopcopter mogelijk niet zo efficiënt als een quadrotor zonder poten. Maar als je doel zoiets is als inspectie of zoek- en reddingsacties, waarbij je veel tijd moet doorbrengen zonder veel te bewegen, kan springen veel efficiënter zijn.
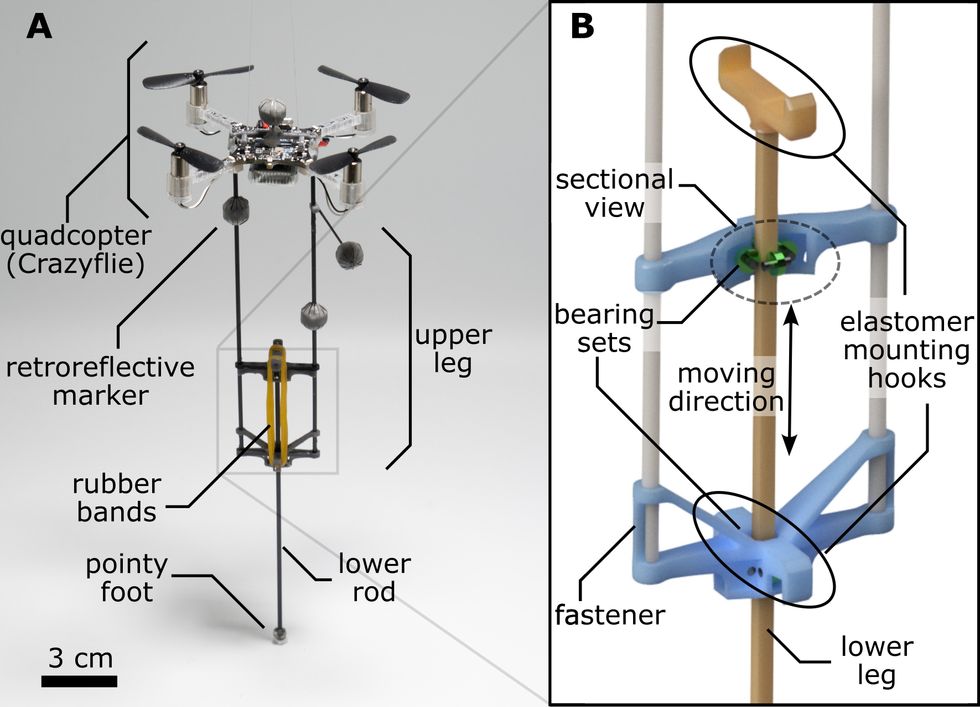 Een Hopcopter is een kleine quadcopter (met name de Crazyflie) die is bevestigd aan de veerpoot van een pogostick.Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
Een Hopcopter is een kleine quadcopter (met name de Crazyflie) die is bevestigd aan de veerpoot van een pogostick.Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
 De Hopcopter kan tijdens het vliegen worden gewijzigd om van verschillende oppervlakken te springen.Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
De Hopcopter kan tijdens het vliegen worden gewijzigd om van verschillende oppervlakken te springen.Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
Het eigenlijke springen is meestal passief. Het hopcopterbeen bestaat uit twee stijve delen die met elkaar zijn verbonden door elastiekjes, met een Gekke vlieg een microcopter bevestigd aan de bovenkant. Tijdens een sprong kan Crazyflie richtingskracht toevoegen om sprongen te laten stuiteren en zowel de richting als de hoogte te veranderen, van 0,6 meter naar 1,6 meter. Er is niet veel ruimte voor extra sensoren op de Hopcopter, maar de toevoeging van enkele stabiliserende vinnen maakt continu springen mogelijk zonder enige positionele feedback.
Naast verticaal springen kan de Hopcopter zichzelf ook in de lucht positioneren om in andere oriëntaties van oppervlakken te springen, waardoor hij vrijwel onmiddellijk van richting kan veranderen, wat een leuke truc is.
En hij kan zelfs salto’s maken in de lucht, want waarom niet?
 Het trucrepertoire van Hopcopter omvat salto’s.Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
Het trucrepertoire van Hopcopter omvat salto’s.Songnan Bai, Runze Ding, Song Li en Bingxuan Pu
De onderzoekers, gevestigd aan de City University van Hong Kong, zeggen dat de technologie van de Hopcopter (namelijk het elastische been) gemakkelijk kan worden toegepast op de meeste andere quadcopter-platforms, waardoor deze ook in Hopcopters kunnen worden veranderd. En als u meer geïnteresseerd bent in extra lading dan in extra uithoudingsvermogen, kunt u springen gebruiken in situaties waarin de lading te zwaar zou zijn voor een langdurige vlucht.
De onderzoekers publiceerden hun werk op 10 april Wetenschap Robotica.